
CS231n/EECS598 学习笔记(一) Lecture 1-4
课程介绍
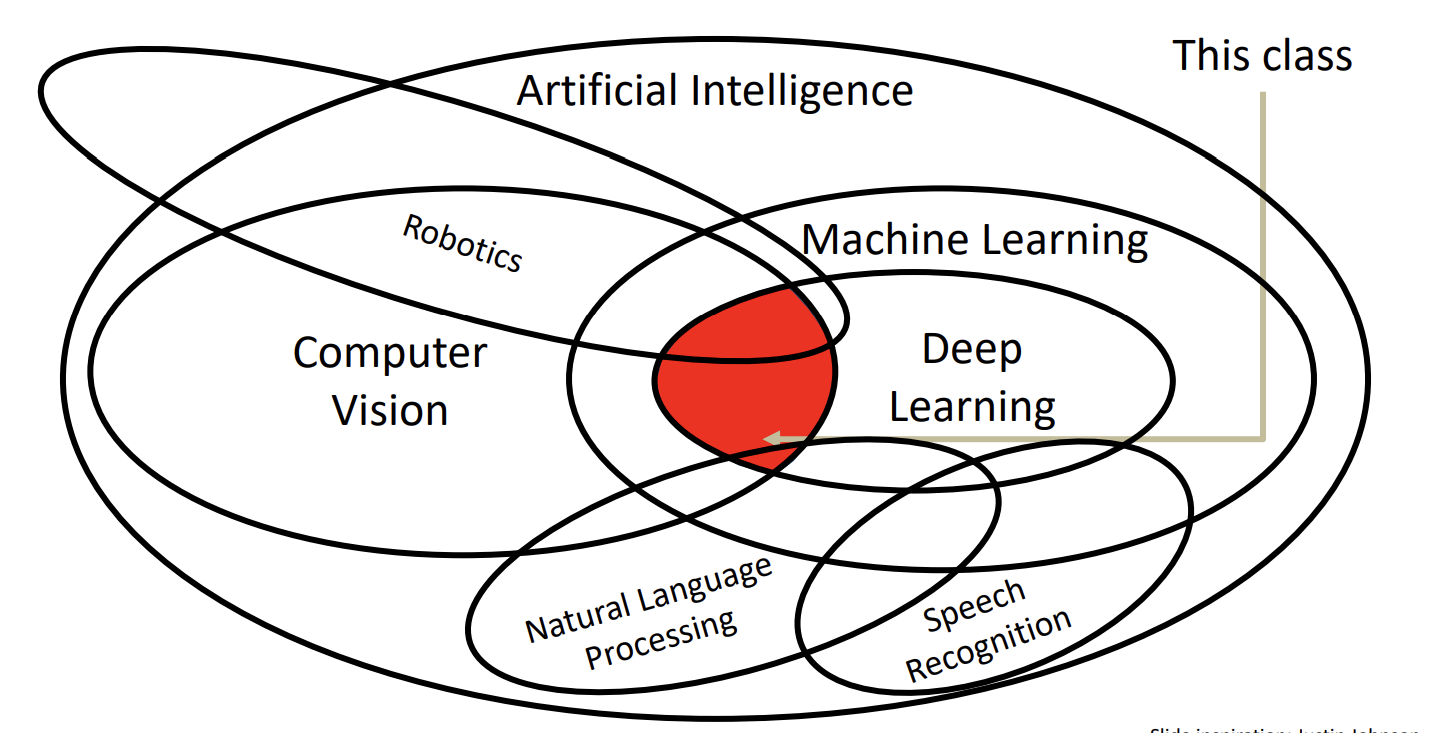
Deep Learning for Computer Vision是一门介绍深度学习在计算机视觉中的应用的课程,本课程中介绍了如何实现、训练和调试自己的神经网络,并详细展示了计算机视觉的前沿研究。课程中还包括一些训练和微调视觉识别任务网络的实用工程技巧。CS231n是斯坦福大学的版本,由于这门课程在网络上最新的版本是2017年比较早,因此我选择了教学大纲基本相同,但有额外扩充内容的另一门课程,密歇根大学的EECS498/598,这门课在网上公开的最新版本是FA2019。
课程相关链接:
http://cs231n.stanford.edu/schedule.html
课后作业答案
下面是我的作业解答链接
https://github.com/cyrus28214/EECS598-solutions
Lecture 1
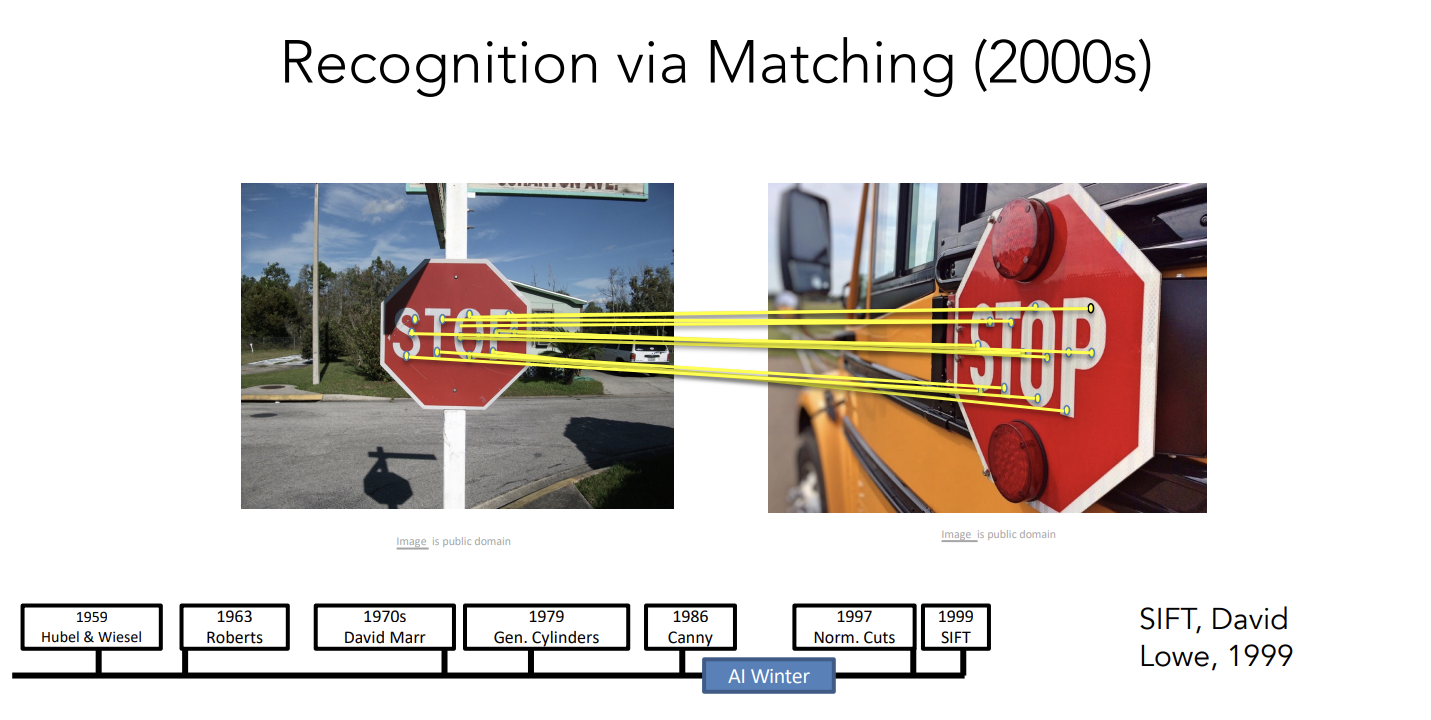
对计算机视觉做了简单的引入,主要介绍了计算机视觉的发展历史。
这篇CV领域著名的论文SIFT完成了recognition in matching的任务。
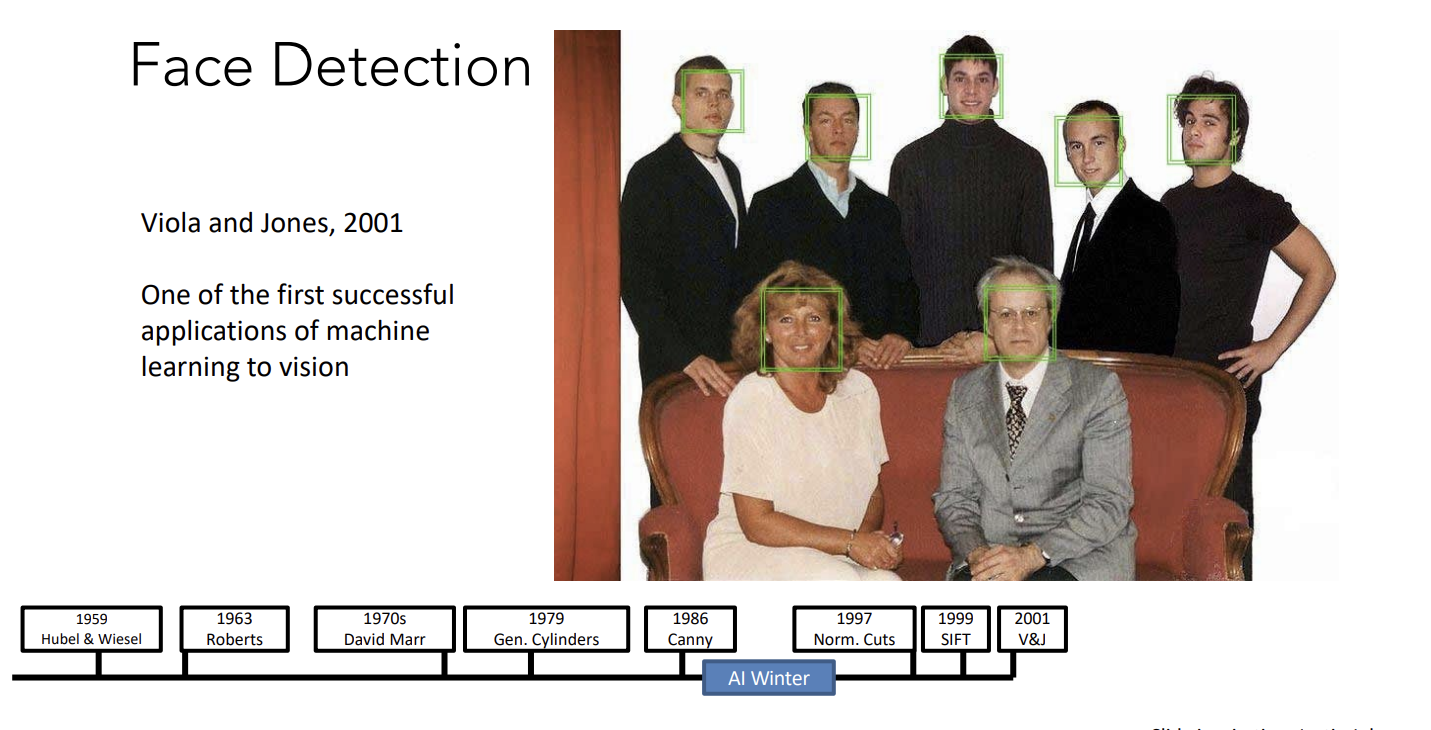
人脸识别方面的技术得到了迅速的商业化。
ImageNet项目作为一个图像数据集,其数据规模达到了惊人的1400万张图片,也成为了计算机视觉领域算法效果的重要检验标准。随后,AlexNet将深度学习引入计算机视觉领域,大大地降低了错误率,并开启了深度学习在CV领域的广泛应用。
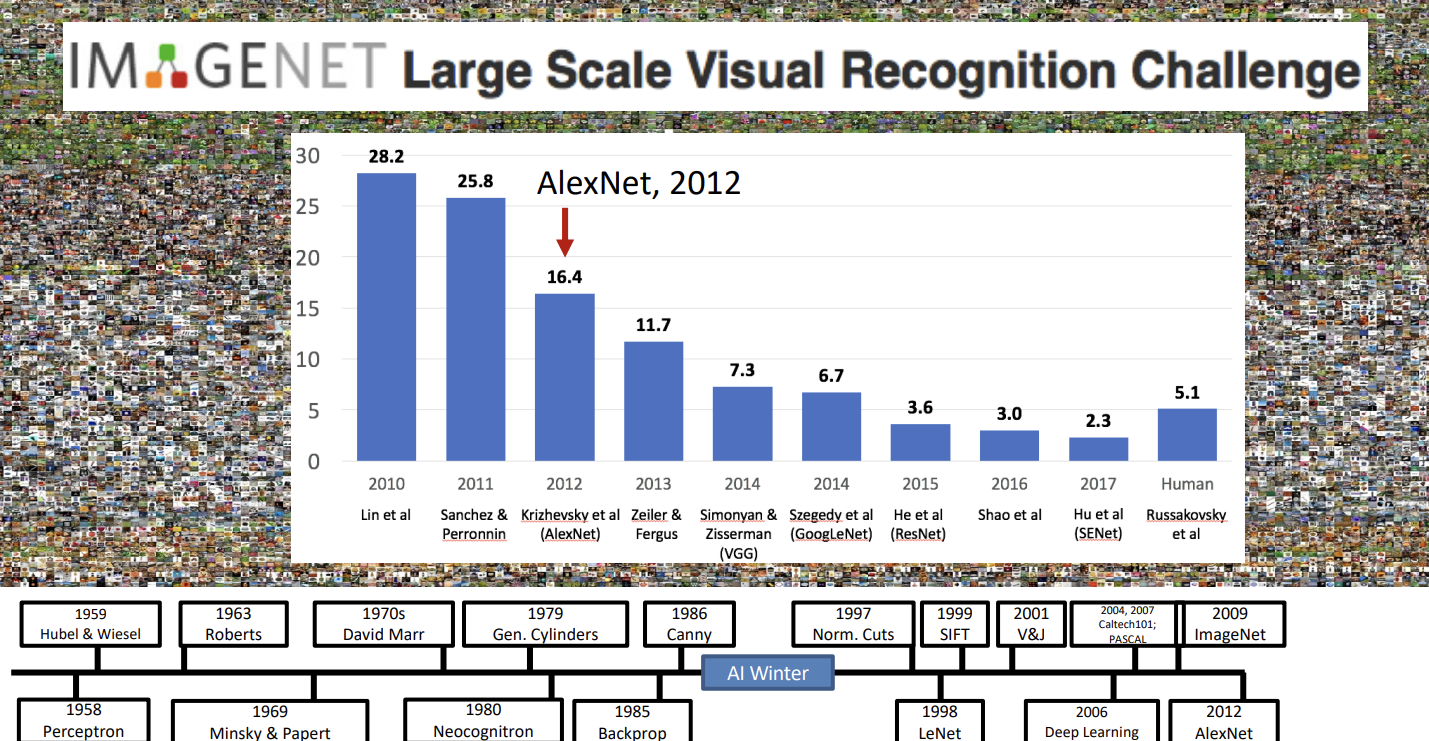
GPU的发展极大地增加了计算机视觉的计算能力。结合深度学习的模型,使计算机视觉领域得到突破。
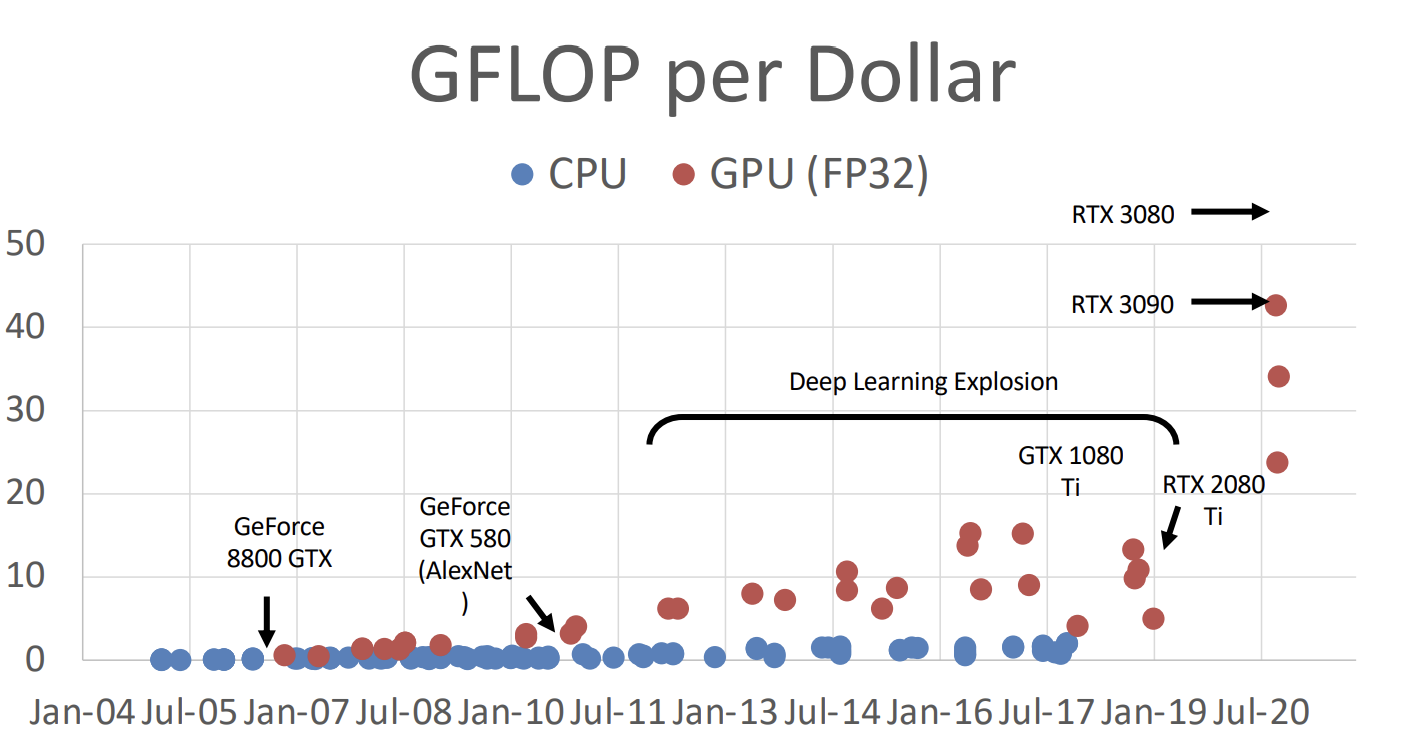
Justin教授认为,计算机视觉领域的发展,主要取决于三个因素:算法、数据、计算。这三个方面对应上面提到的深度学习、ImageNet、GPU for deep learning。

Lecture 1剩下的内容就是一些课程大纲的介绍,就不提了。
Lecture 2
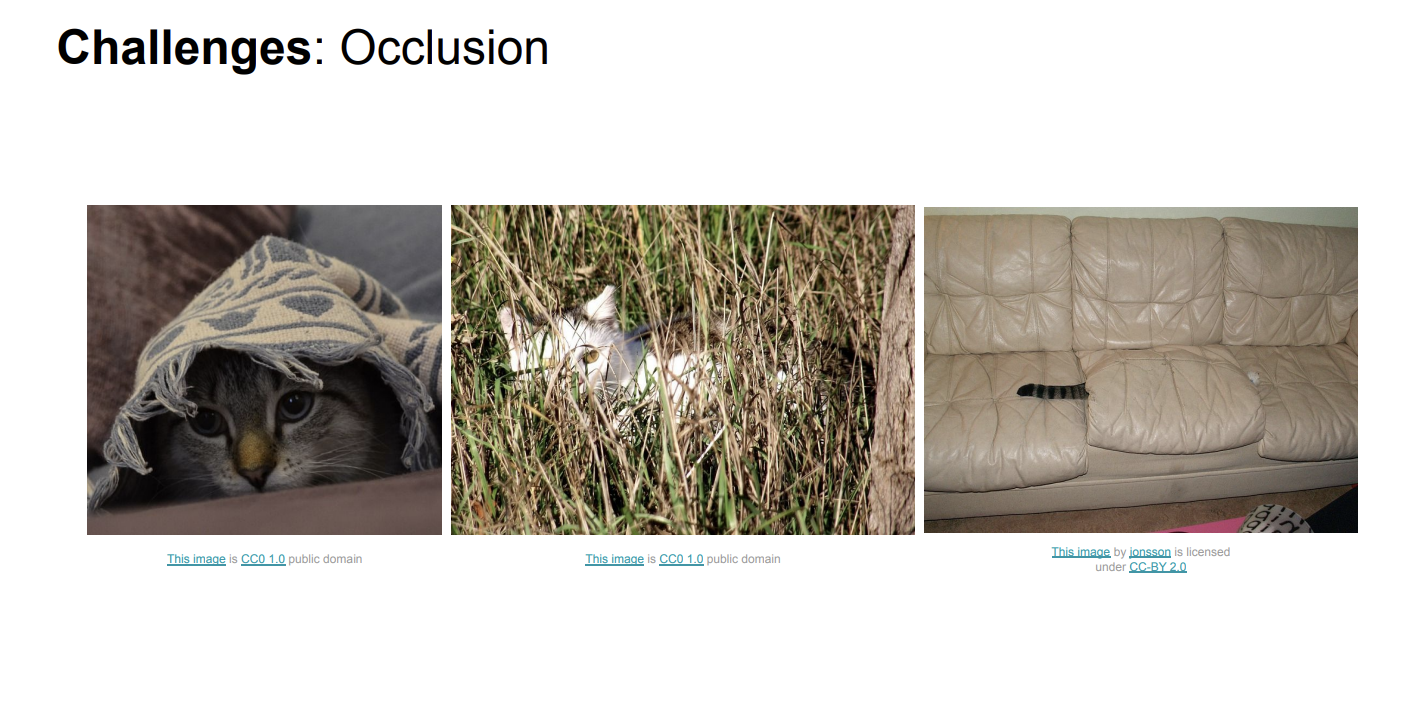
Lecture 2首先使用了猫作为例子来阐述图片分类任务有哪些挑战,这个例子非常令人印象深刻,我看过的一些博客文章里,也引用了这个“CS231n的猫”的例子。
图片分类任务的挑战主要包括:
- 所谓的Semantic Gap,我看了一下,大致的意思就是说人类可以一眼看出来图片上是个猫,但是在计算机眼中,图片只是一堆数字组成的点阵,而且人类没法设计一个精确的算法告诉计算机什么是猫,怎么识别猫。
- 不同的视角:即使是同一只猫,在不同的视角下拍摄的图片也会大不相同。
- 光照:光照也可以是识别的对象发生很大的改变。
- 背景干扰:不同的背景可能会干扰模型的识别结果。
- Occlusion:有时图片里的猫不会是一个完整的个体,而是有部分被遮挡了。
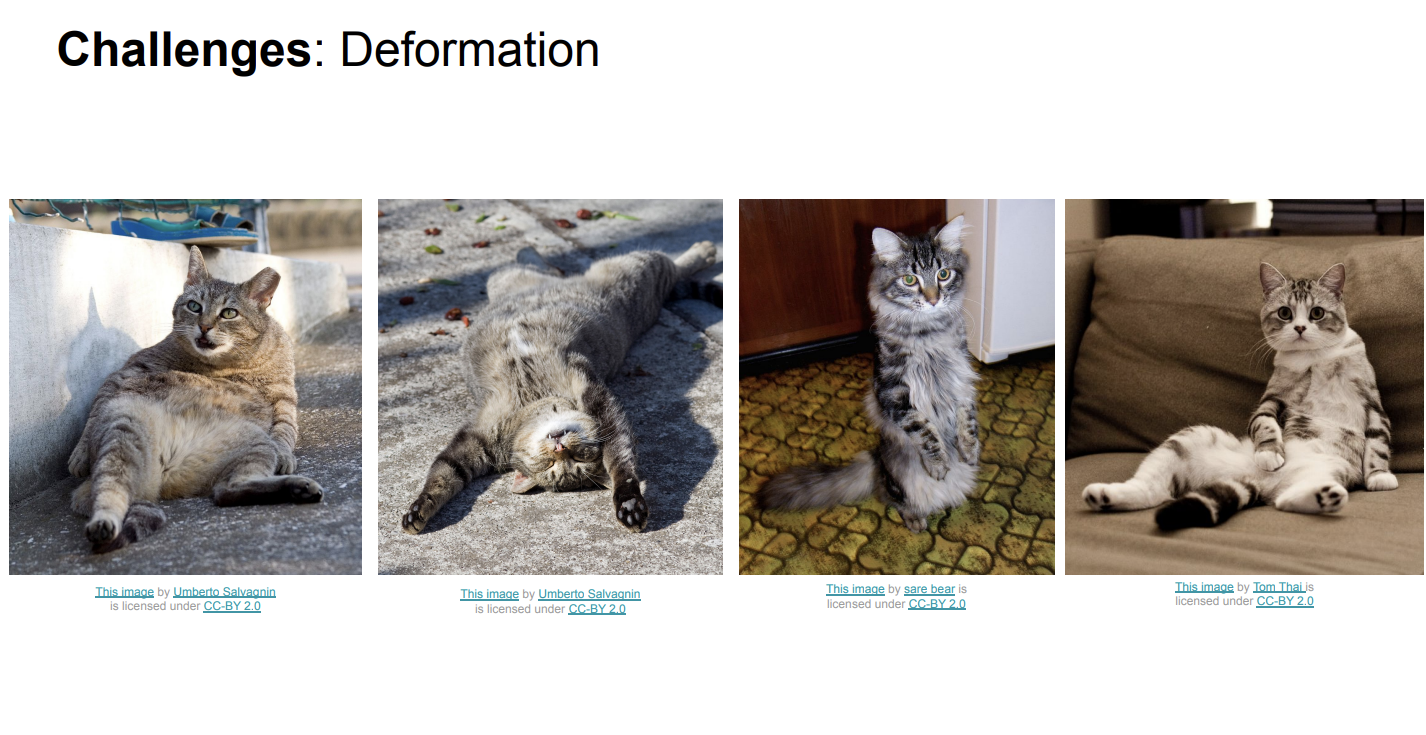
- Deformation:物体会发生形变,譬如猫有不同的姿态,站着、躺着、坐着……
- Intraclass variation:猫的品种不同,它们有不同的颜色、花纹、大小等。给计算机视任务造成了困难。
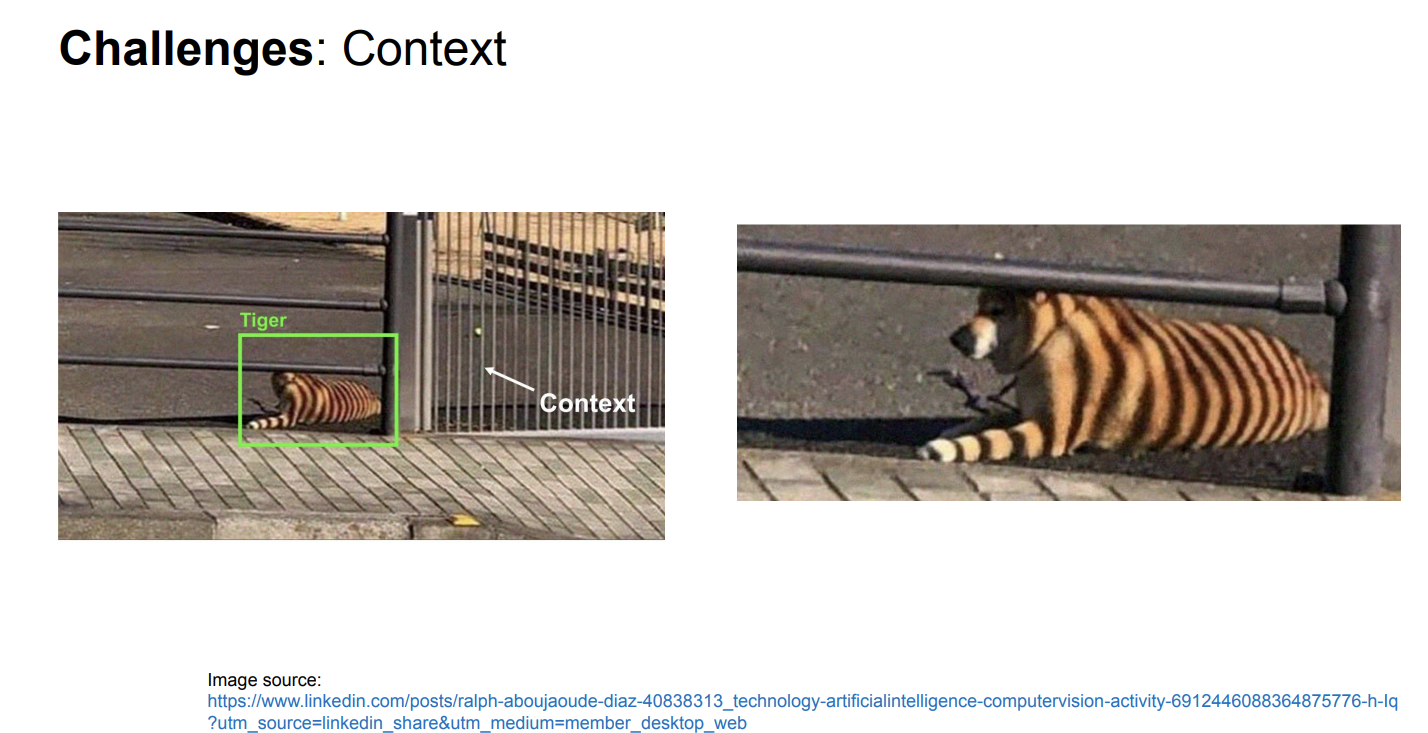
- Context:比如说,猫可能与场景中的其他物体有关系,比如猫的身上有栏杆投下的影子,使得猫看起来像一只老虎,我们的算法甚至还需要理解现实世界的一些规律。
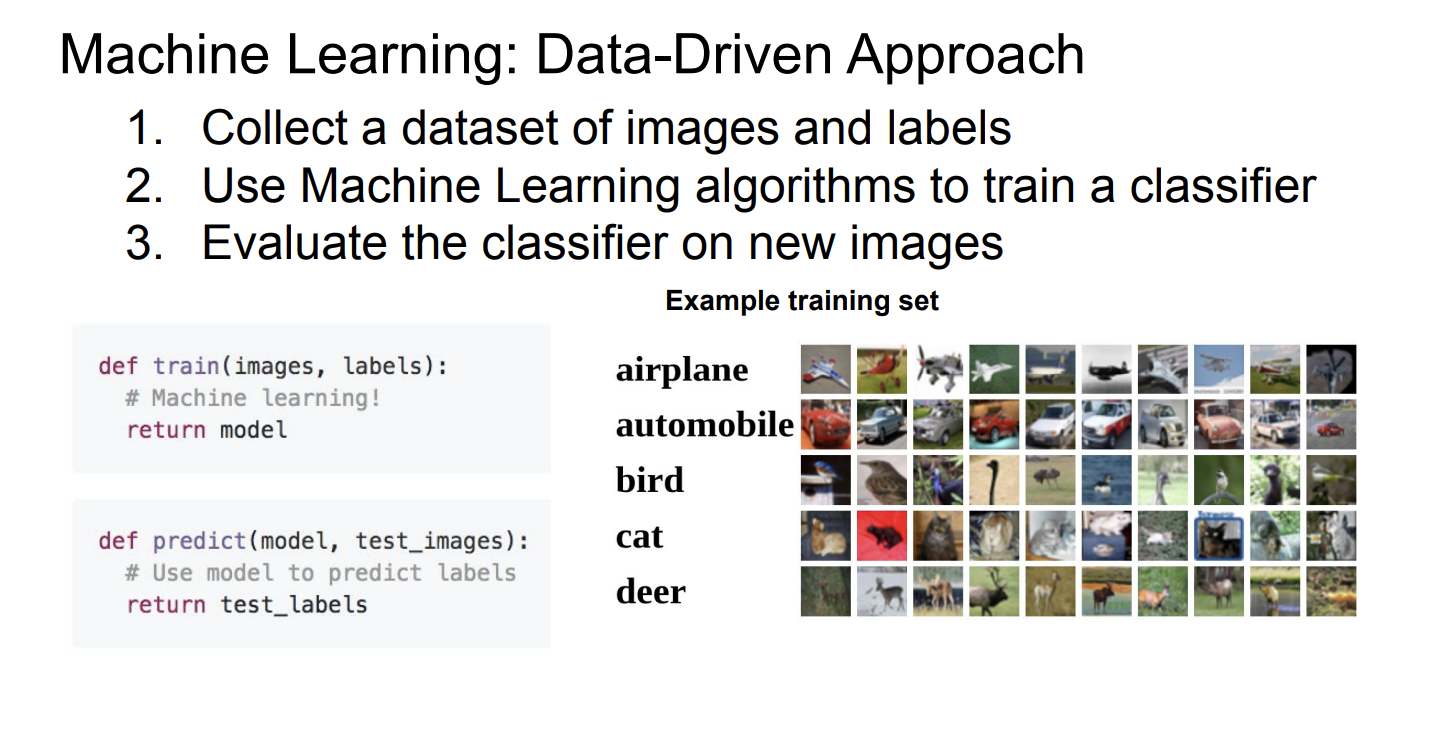
要解决上面的问题,可以使用数据驱动(Data-Driven)的算法,这样你无需语义化地告诉计算机什么是猫,只需要提供大量的猫的图片,让计算机自己学习什么是猫。
这种方法同时带来了另一个好处:可重用,也就是说,你使用猫的图片训练模型,模型就能识别猫,使用星系的图片训练模型,模型就能分辨星系的种类。你无需为各种计算机视觉任务开发不同的模型。
KNN算法(K-Nearest Neighbor Classifier)
KNN算法是一种非常简单的数据驱动算法,它非常容易实现。KNN并不是一个进行图像分类的理想算法(但是经常和其他算法结合,达到更好的效果),课程使用KNN应该是为了以此为例,解释数据驱动的算法。
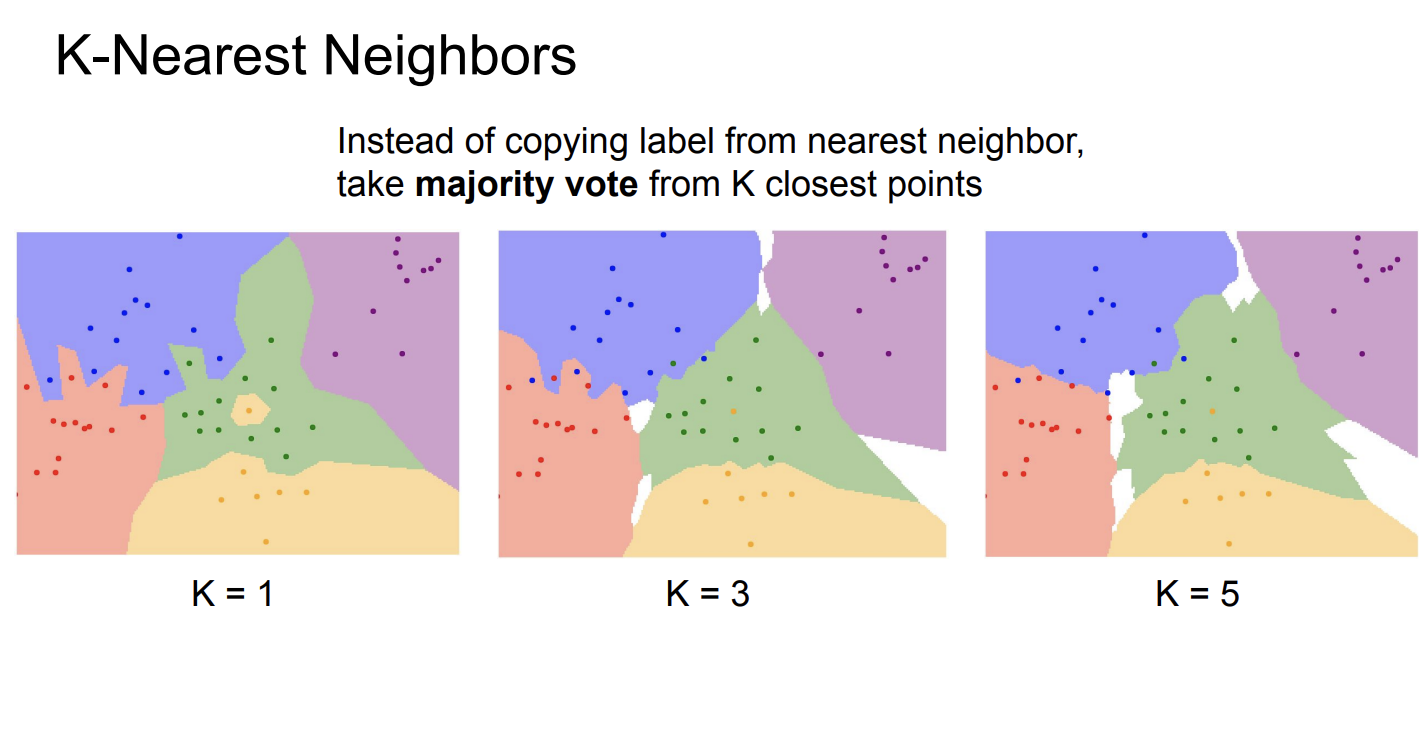
KNN的基本思想是:我们首先将训练的图片保存在模型中。给定一张新的图片,我们首先计算这张图片与所有训练图片的距离,然后选择距离最近的K张图片,这K张图片中,出现次数最多的类别,就是这张图片的类别。
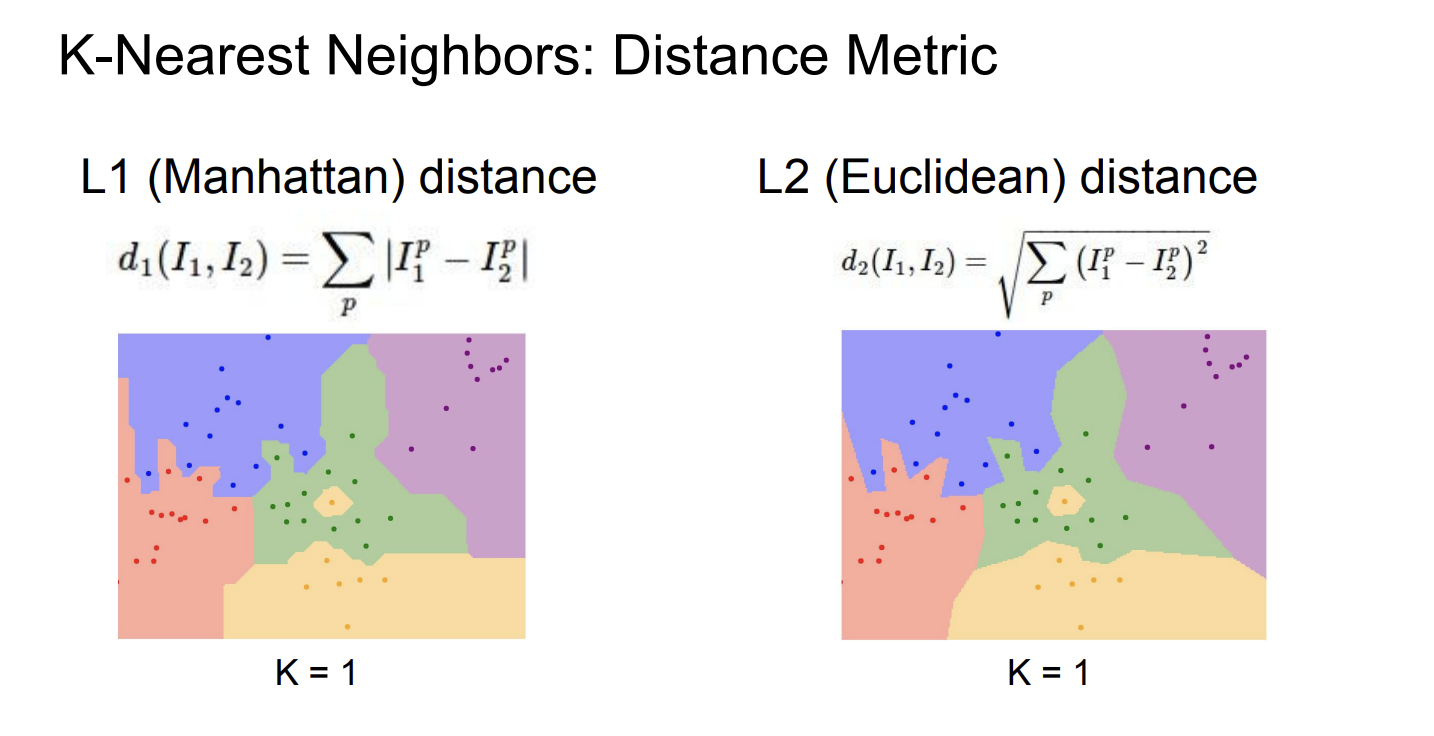
要计算图片之间的距离,首先你要把图片变成一个一维向量,比如一张(H, W, C)的图片(H、W、C分别代表高度、宽度、通道),就可以变成一个(H*W*C)的向量。然后,我们就可以计算任意两张图片之间的距离了。
距离函数有多种选择,如L1距离(曼哈顿距离)、L2距离(欧式距离)。公式如下:
从图中可以发现,L1距离实现的KNN算法的特点是决策边界都是横线、竖线或45°斜线,而L2距离实现的KNN算法的决策边界可以是任何直线。
像这样,不是通过模型训练得到,而是提前设置好的参数,被称为超参数(Hyperparameter)。
训练集和测试集(Training Set and Testing Set)
训练集和测试集是两个非常重要的概念。训练集用于训练模型,测试集用于评估模型的性能。
为什么要分训练集和测试集呢,因为你的模型有可能在训练集上表现很好,但是在测试集上表现不好,这种现象被称为过拟合(Overfitting)。
假如你将所有数据都作为训练集,那么你将无法评估你的模型到底在从未见过的数据集上表现如何。
具体到KNN算法来说,假如你选取,并使用同一份数据进行训练和测试,那么结果会怎么样?
答案是你的模型将永远是100%正确,你无法评估模型的效果如何。
交叉验证(Cross Validation)
交叉验证是用来评估模型性能的常用方法。将数据集分成n份,每次选择其中一份作为验证集(Validation set),其他n-1份作为训练集,然后训练模型,最后在测试集上模型的性能。交叉验证可以防止因为分割数据方式不同引起的误差。
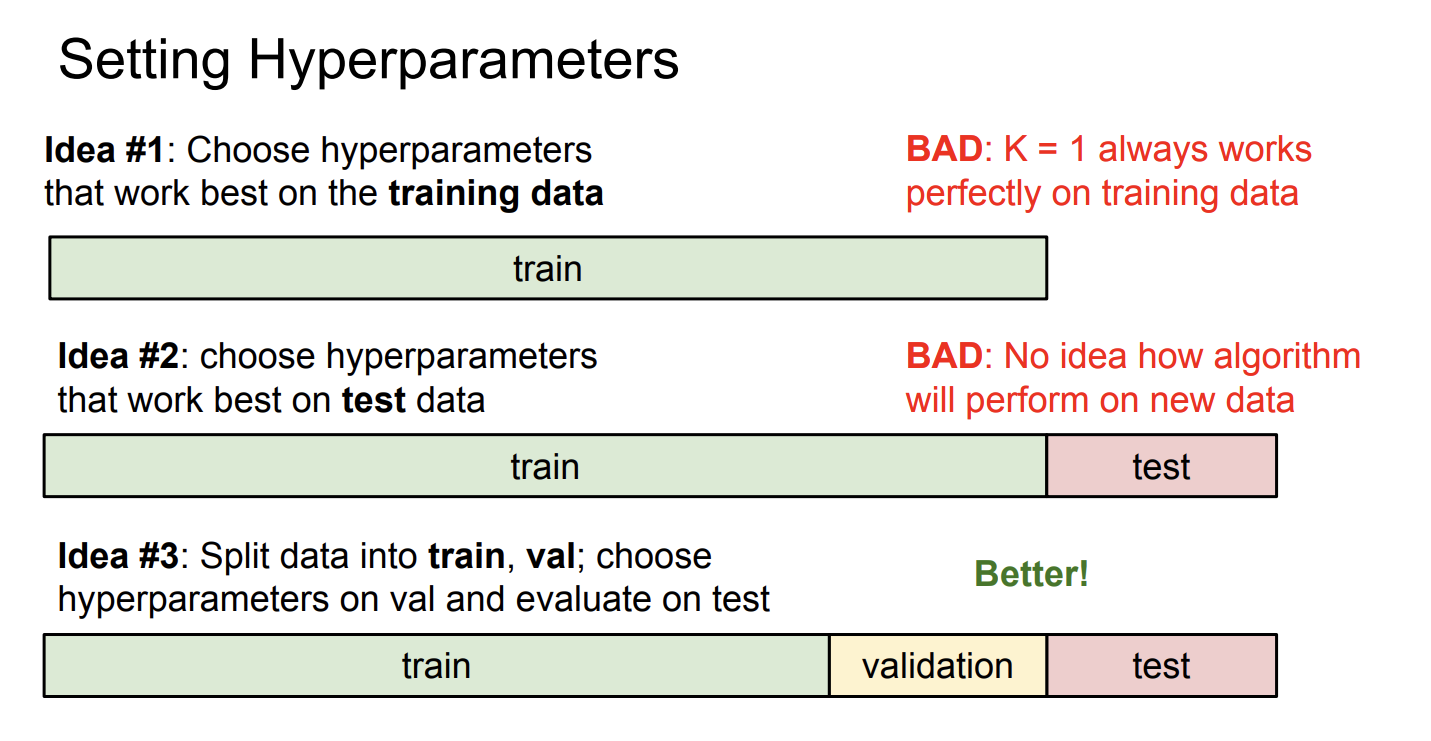
设置超参数
KNN中有一个参数,代表选择最近邻的个数。的取值不同,KNN算法的效果也不同。
我们可以用交叉验证来设置超参数,我们不能故意选择一个使得模型在测试集上表现很好的。我们只能在最后使用测试集评估性能,不能人为地引入误差使得模型在测试集上表现很好。
在我们的KNN模型中,我们设置不同的,然后在验证集上测试模型的效果,得出了表现最好的,然后用的模型在整个训练集上训练,最后用测试集评估结果。
按照我的理解,越小模型越倾向于过拟合,而过大的话模型容易欠拟合。
KNN的缺陷
- 图片之间的距离并不能很好的衡量图片的相似程度,比如只是对图片主体进行平移就会使图片距离变得很远。
- 计算的复杂性,课程中提到了Curse of dimensionality,假如我们在低维空间内使用足够多的数据点覆盖空间,KNN算法的确能得到不错的效果,然而随着模型维度的升高,我们需要的数据点个数将以指数增加。图像识别任务通常需要使用非常高(成千上万)个维度。假如我们使用个点覆盖一维坐标轴,那么要达到相似的数据密度,一个平面就需要个点,一个维的空间就需要个点!这是无法接受的
- KNN的训练很快而计算很慢,KNN的训练只需要保存所有数据,如果按照传递引用算就是,而计算新的数据的分类需要计算它与所有点的距离,这是的(是训练数据个数,是维度)。这与我们的希望相反,我们更偏爱训练慢而计算快的模型(下一节课就会有这种模型)。
Lecture 3
线性分类器
这节课介绍了一个新的模型:线性分类器(Linear Classifier)。
线性分类器就是这样一个简单的模型:
其中是一个权重矩阵,是输入的图片。
这个模型重要不是因为它效果很好,而是因为这个简单的模型是完成后续的复杂模型的“积木”。
为了理解这个重要的模型,这节课提供了三种视角:
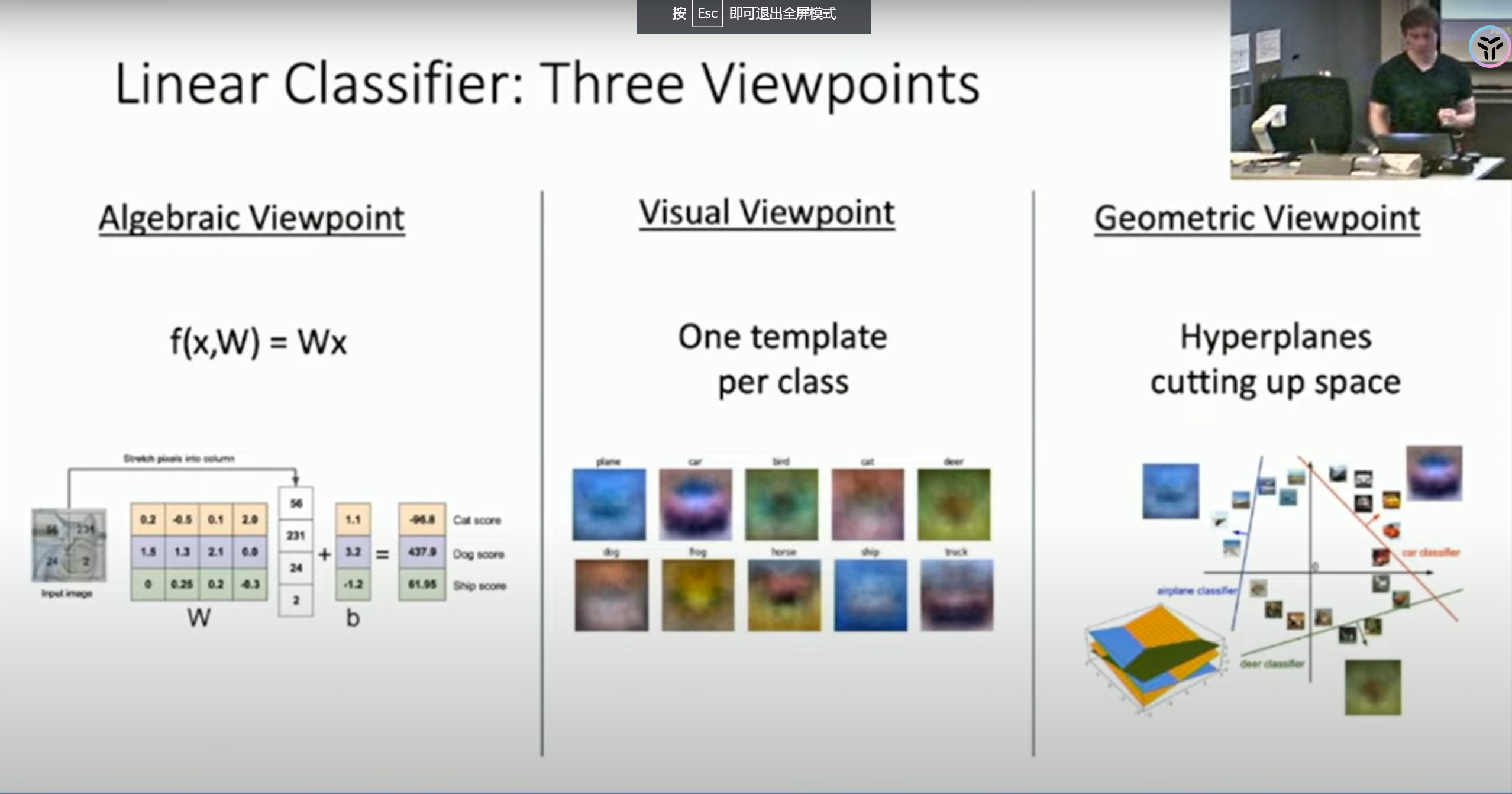
代数视角
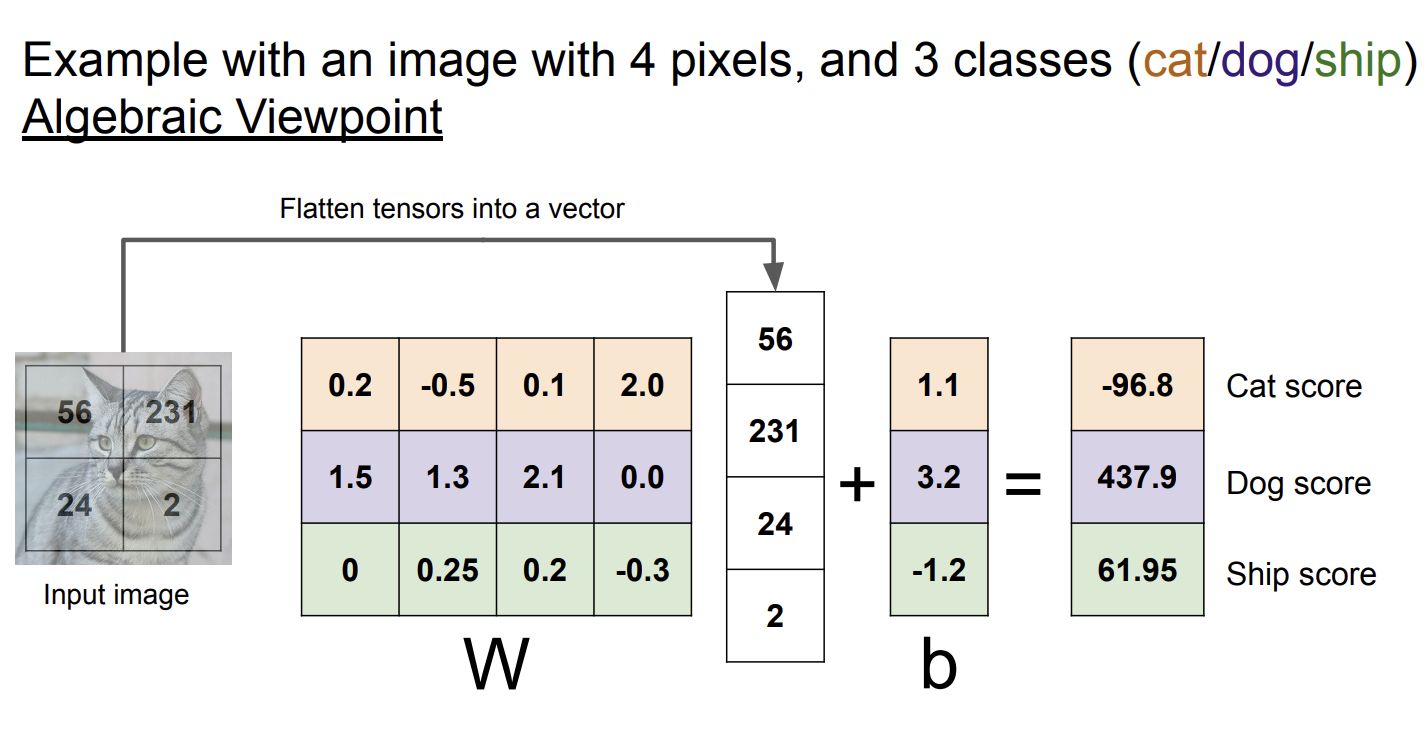
从代数视角看,线性分类器仅仅是把图片乘以一个矩阵,然后加上一个偏置项,一切操作都是线性的,这意味着将图片乘以一个常数,结果也将线性地变化。对于分类图片,这个性质比较奇怪,但是明白这个有利于我们更好地理解线性分类器。
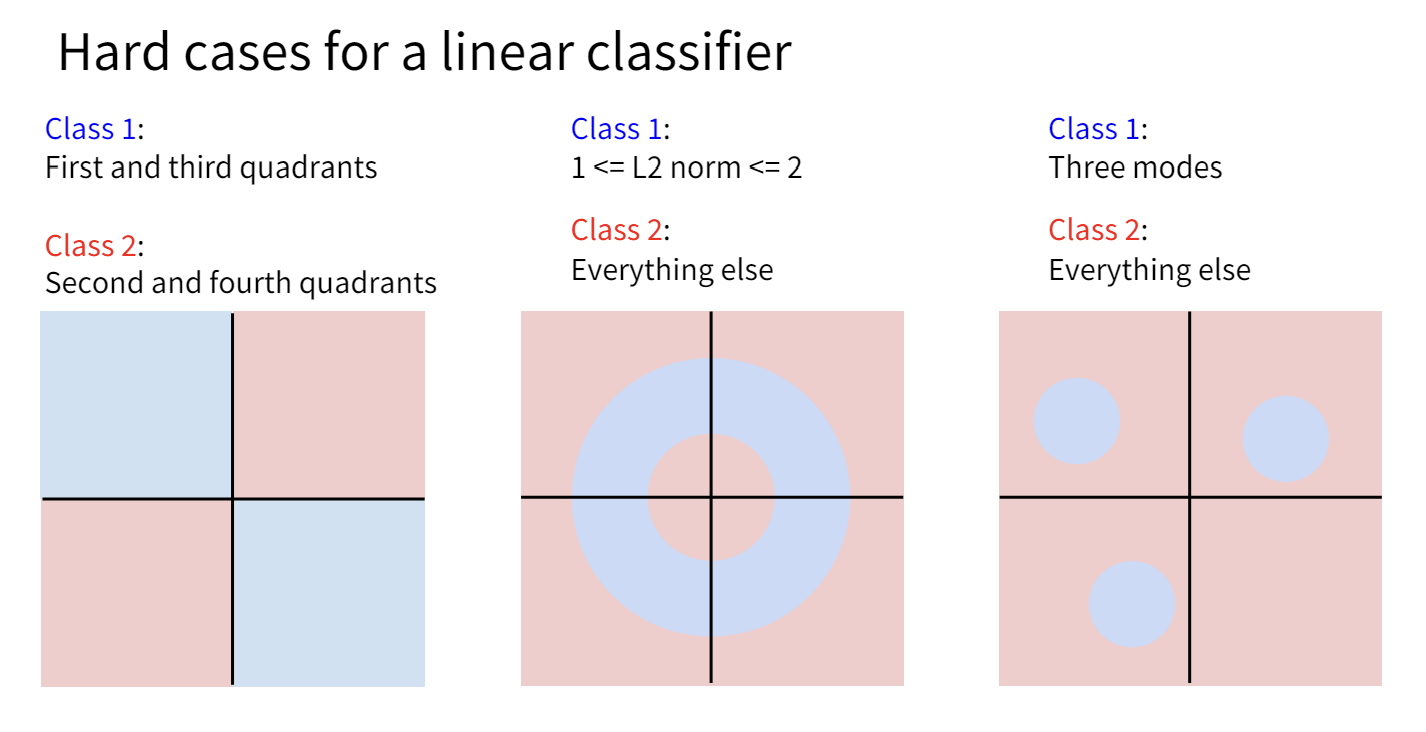
可视化视角
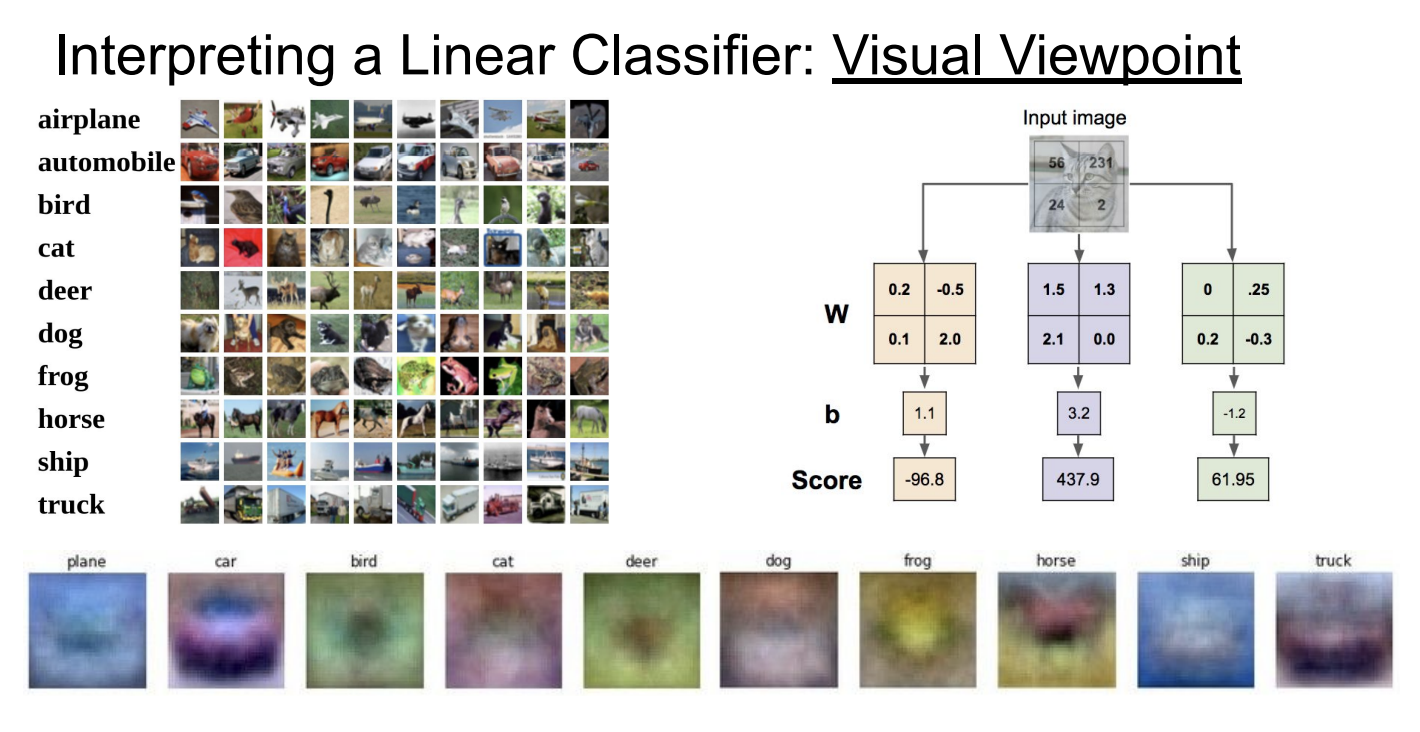
从可视化的视角来看,每一种类别都对应着一个不同的“模版”,我们可以把图片投影到这些模版上,和模版越接近的就会被分到相应的类别。
几何视角
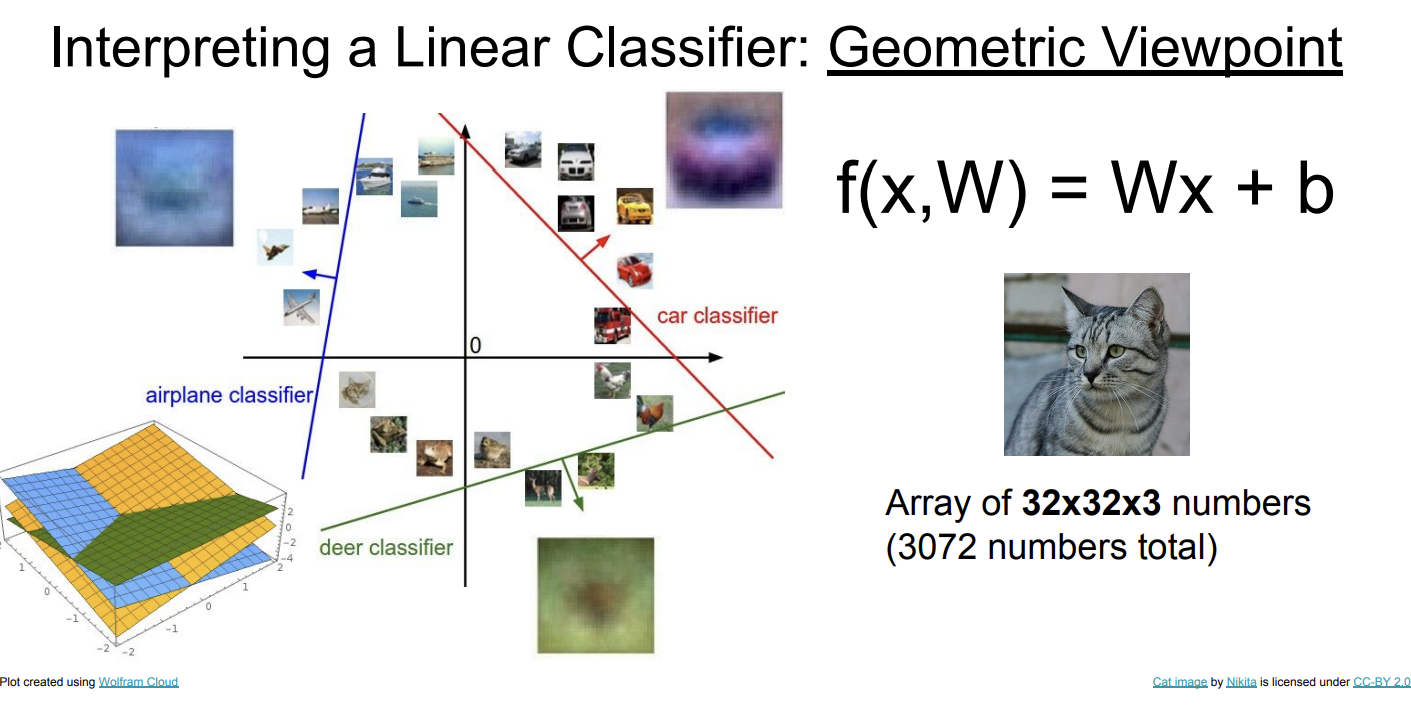
从几何的视角来看,线性分类器就是一个超平面,面向超平面的方向越往前就越属于某个类别。
损失函数
损失函数(Loss Function)是衡量模型预测结果与真实结果的差距的函数。损失越低,意味着模型的预测效果越好。
SVM Loss
SVM Loss会惩罚错误的分类,和不自信的正确分类。
总的Loss是所有之和
正则化(Regularization)
正则化可以防止过拟合。正则化向损失函数中加入一个正则化项,惩罚模型中过大的参数:
其中是正则化项,是正则化系数。
L2正则化:
L1正则化:
Elastic Net:结合使用L1和L2正则化:
更多方案包括Dropout、Batch Normalization等。
正则化更喜欢简单的模型,里面如果有绝对值很大的系数,就会变大,这使得模型在获得更好的表现的同时采用更简单的方法,避免了过拟合。
交叉熵(Cross Entropy)
交叉熵将模型的预测结果转换为概率分布,然后计算真实结果的对数似然。
Lecture 4
优化
优化(Optimization)是指找到使得损失函数尽量小的模型参数。
梯度下降
如果把损失函数看作是一座山脉,如果你要下山,你会每次都沿着高度降低的方向走,这就是梯度下降的思想。
梯度下降法计算出损失函数在当前参数的梯度,然后沿着负梯度的方向走一小步,然后更新当前参数,重复这个过程。
这里写的是负梯度而不是梯度,是因为数学上,梯度的定义是
这是一个矢量,矢量的方向指向函数增长最快的方向,而反过来,负梯度的方向就是函数减小最快的方向。
数值方法和分析方法
为了精度和效率的考虑,我们应该使用analytic的方法而不是numerical的方法来计算梯度。像PyTorch这样的深度学习框架都有Autograd的功能,可以方便地自动计算梯度,但有时你也需要手写梯度计算的代码。
Numerical gradient精度又低计算速度又慢,最好不要使用。例外是gradient check,你可以用数值的方法来验证analytic梯度计算的正确性。这个也不需要你手写,torch.autograd.gradcheck专门用来干这个。
学习率
学习率(Learning Rate)是梯度下降法中一个重要的超参数。学习率决定了模型参数更新的步长,如果学习率过大,模型可能无法收敛到最优解,如果学习率过小,模型收敛速度会很慢。
我们上面提到,梯度下降法就是每次向负梯度的方向走一小步,学习率决定了这一步有多长。
其中是学习率。在训练模型的时候我们会反复应用这一更新规则,直到损失函数下降到可以接受。
Batch
是我们训练集的大小,当比较小的时候,我们可以一次性计算所有梯度。但是当比较大的时候,一次性计算梯度会是比较昂贵的,(比如显存不够用之类的),这时我们可以分 batch计算梯度,每次只送入一部分数据计算梯度,然后更新参数。
这就引入了一个新的超参数batch_size。超参数越来越多了,终于有调参炼丹的感觉了(bushi
batch_size的参考取值差不多是32、64、128、256这个大小。
随机梯度下降(SGD)
随机梯度下降没什么难理解的,就是每次从训练集中随机sample一个batch来梯度下降。
SGD + Momentum
SGD有一些问题。
Zigzag
由于SGD每次选择梯度最低的方向,如果某个维度上梯度下降很快,那么其他维度上的步长就会很小,导致算法走出zigzag的形状。
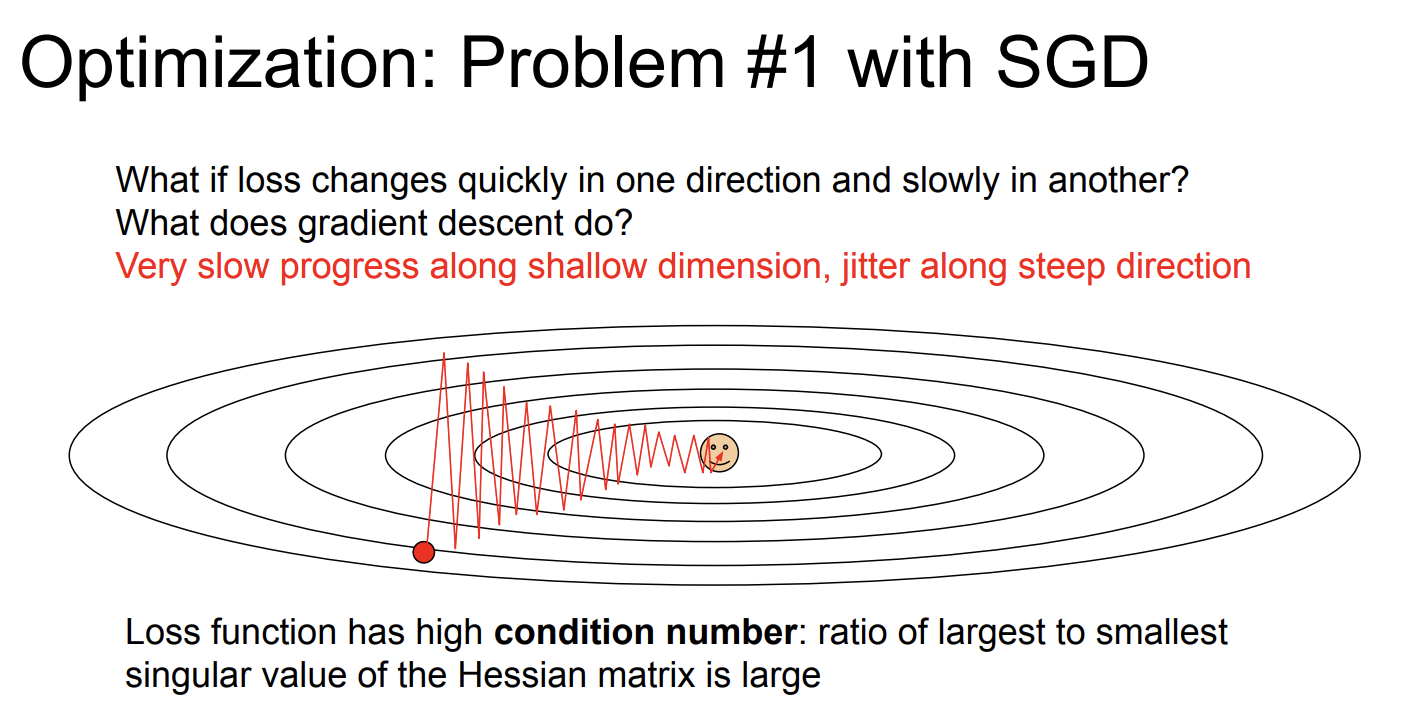
关于图片底部这句话,想要理解它需要一定的线性代数基础,如果不懂的话跳过也没关系。
Aside: Loss function has high condition number: ratio of largest to smallest eigenvalue of Hessian matrix is large.
下面是我个人的一点理解:
Hessian矩阵可以类比成是一元函数的二阶导。直观理解的话,Hessian矩阵可以描述函数在某一点处弯曲的形状。
矩阵的条件数可以衡量矩阵有多“扁”,比如正交矩阵你就当做是一个圆,它每一个方向上都一样长,它的条件数是1。一个条件数很大的矩阵可以看成一个很扁的椭圆,它最显著的维度和最不显著的维度相差很大。
Hessian矩阵的条件数很大的话,说明loss funtion在某个维度上面呈现陡峭的“V”形,函数的梯度来回变化,导致算法走出zigzag的形状。
鞍点
鞍点(Saddle point)就是长这样的点:
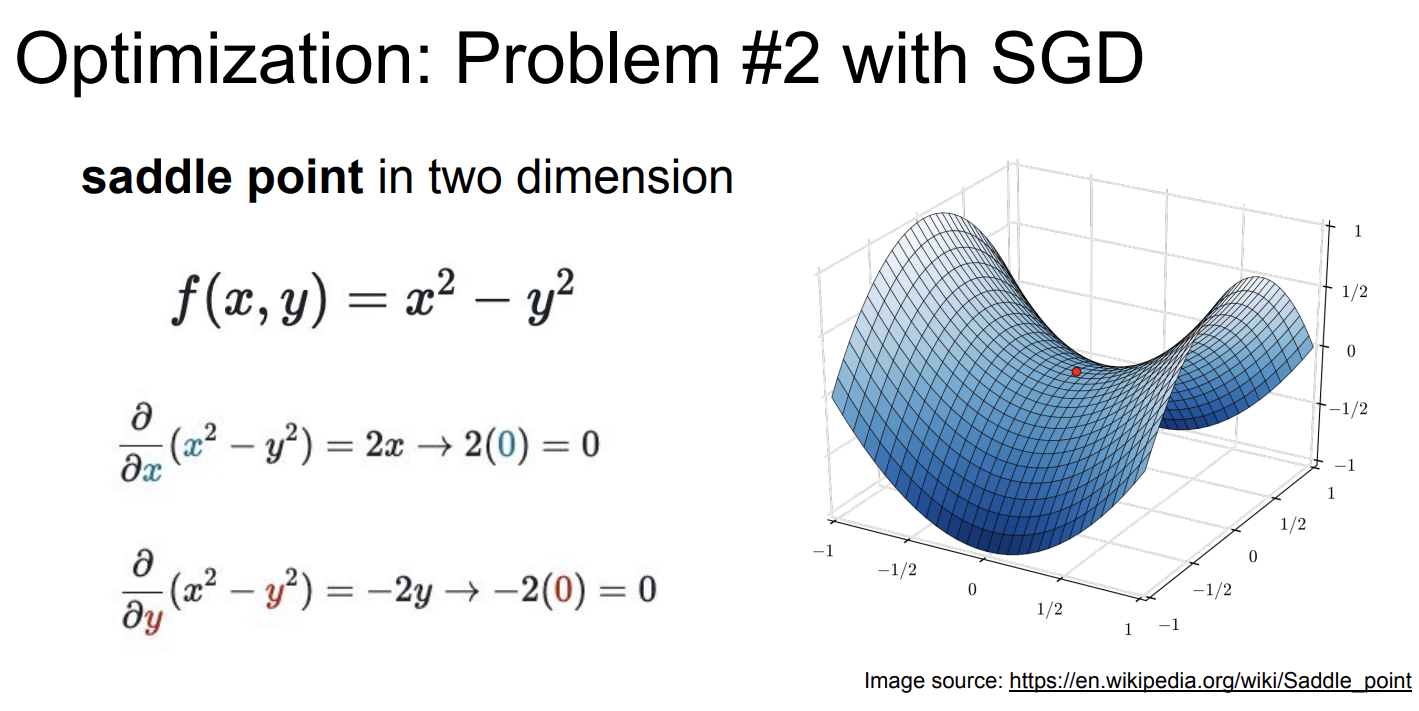
鞍点并不是极小值,但是鞍点的梯度却是0,按照之前的算法,零梯度会让我们卡在鞍点动不了。
顺带一提,Hessian矩阵也可以用来判断鞍点,如果,且是不定矩阵,即特征值有正有负,那么就是鞍点。(当Hessian矩阵有零特征值的时候这个判断失效,需要展开到三阶或以上)
解决方案
这两个问题都可以通过引入动能项来解决。
这个方程有很多种写法,如果见到了不一样的形式不用奇怪,都是对的
就好像给了这个点一个速度,让它记住历史的梯度,用来模拟摩擦,让速度衰减,然后每次用梯度更新速度,再用速度更新参数。
引入动能项可以解决zigzag问题,因为两个相反方向上的梯度会在动能项里相互抵消,让模型专注于其他维度。
也可以解决鞍点问题,模型走到鞍点的时候还有动能,不会停滞不前。
一举两得!
Nestrov Momentum
Mestrov Momentum是SGD + Momentum的变种,它用了“look ahead”的思想,使用而非处的梯度。
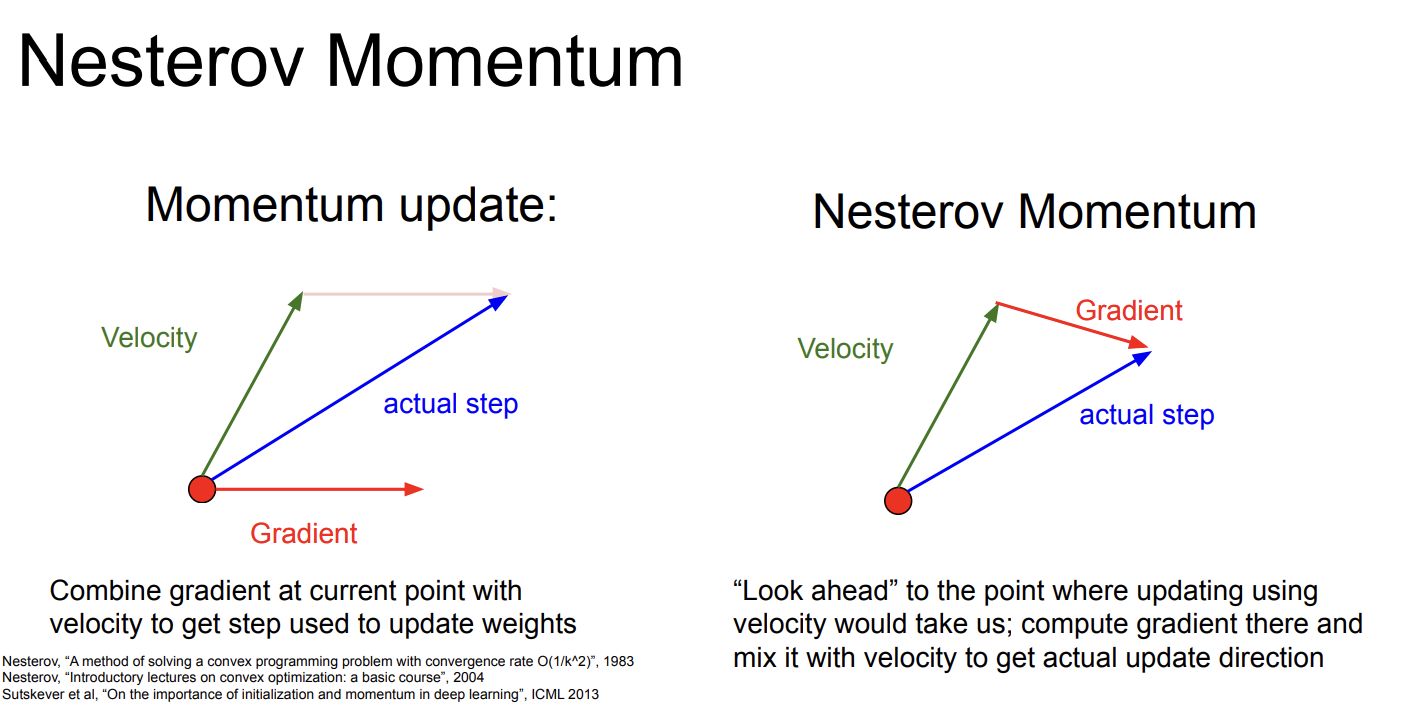
关于这个算法我查阅了相关资料,之所以这样做有更好的效果,是因为这种做法会包含函数的二阶项,允许更加精细的梯度下降(但不是真正的二阶近似)。具体的数学推导比较冗长,有兴趣可以自行了解。
Adagrad
Adagrad是一种自适应学习率的方法,它会动态调整学习率。当梯度比较平坦的时候走得快一点,梯度比较陡峭的时候走得慢一点。
RMSprop
RMSprop是Adagrad的变种,增加了Decay。
Adam
Adam≈RMSprop + Momentum。Adam是实践中非常常用,效果也很不错的Optimizer。
L-BFGS
到目前为止我们的优化算法都是一阶近似,而BFGS算法使用了二阶近似,当一次性使用整个训练集做full batch的时候效果非常好,但是当使用mini-batch的时候效果不怎么好。这比较好理解,因为用到了二阶项,如果batch太小的话,高阶项比低阶项更容易出现偏差。
缺点是复杂度是的,一般只用于小数据集。
L-BFGS是BFGS的内存优化版本。
In practice
- Adam是一个很好的默认选择,在大多数情况下效果不错。
- SGD + Momentum有时比Adam好,但是需要很多玄学调参。
- 如果训练集比较小,你的机器能跑,试试L-BFGS吧。
 微信
微信


{kind=link}